网络设备模拟器之EvE-NG安装配置
- 网络模拟器
- 2021-03-19
- 3425热度
- 0评论
-
EVE-NG社区版安装 最新版v2.0.3-112 (11 January 2021)
硬件配置要求
内存 8G 硬盘 512g一、下载EVE镜像包ova文件
(EVE-NG官网:http://www.eve-ng.net/)
目前EVE-NG提供两种安装方式:
1 ISO安装盘
2 OVA虚拟机模版
后台可回复EVE-NG安装资源获取百度云盘,天翼云等下载链接
注意:EVE-NG内嵌KVM,KVM(Kernel-based Virtual Machine)是基于内核的虚拟机,可以把它理解为和VMware Workstaion/Virtual Box等虚拟机系统或vSphere ESXi虚拟机系统。所以本文先用Workstaion装EVE-NG,再用EVE-NG中的KVM虚拟F5、Palo Alto等虚拟机,这样的方案属于嵌套虚拟化或两层虚拟化。
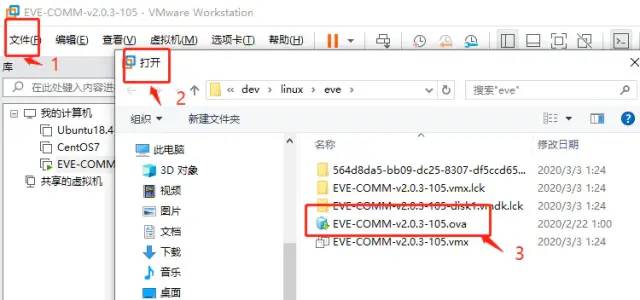
二、导入虚拟机
建议使用vmvare导入eve-ng(以下内容都是基于vmvare),导入后选择默认配置就可以
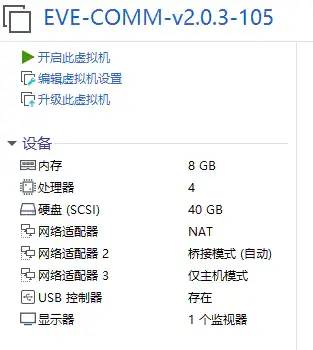
三、开启虚拟机,账号为root,密码为eve,选择默认配置即可。
密码可以修改,为了方便不建议修改
主机名默认
域名默认

ip地址默认dhcp即可

设置ntp服务器,输入pool.ntp.org
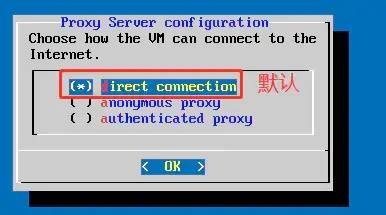
选择连入Internet方式,默认
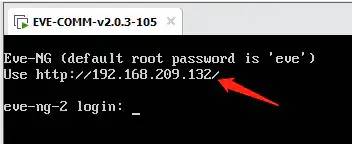
配置完成后eve-ng会重启,重启后显示最初的页面说明安装已完成。
EVE-NG WEB界面登录以及使用
-
在chrome浏览器输入提示的地址进入登录页面
-
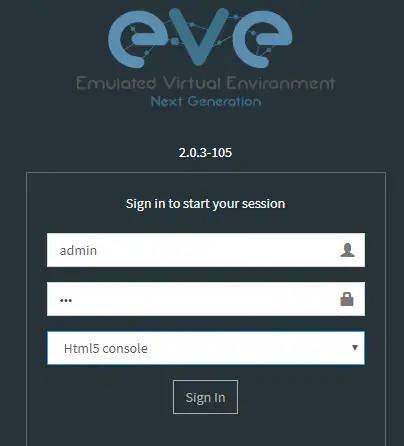
账户admin,密码为eve,初始选择Html5 console(此方式登录设备无需SecureCRT、VNC等软件)
eve主页介绍

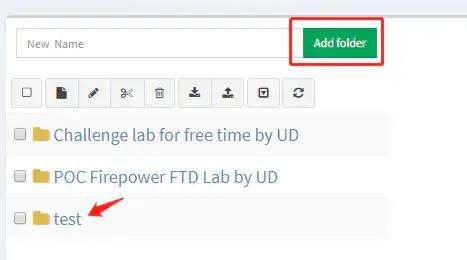
1. 新建项目文件夹:多个同类型实验的根目录。<br>
2. 新建实验:特定用途的网络实验。<br>
3. 重命名。<br>4. 移动目录。<br>
5. 删除选中的文件夹或者实验。<br>
5. 导入导出实验。方便移植lab到其他的eve环境。<p><strong>用户管理可以CRUD操作用户</strong></p>
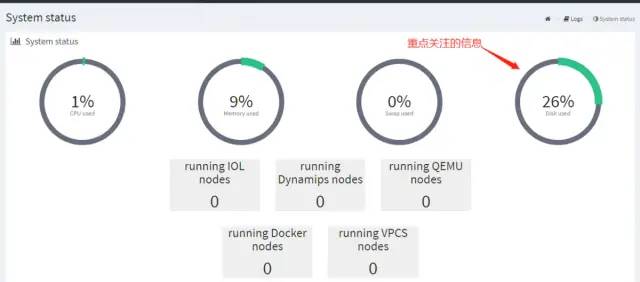
系统信息主要用于查看当前eve系统信息(主要查看磁盘信息)
EVE-NG 导入不同组件镜像
-
导入Dynamips镜像(使用较少)
将本地Dynamips镜像通过WinSCP(推荐)或者其他方式导入eve-ng虚拟机/opt/unetlab/addons/dynamips/目录下

导入后给与读写权限chmod -R 755 *

查看镜像是否导入成功
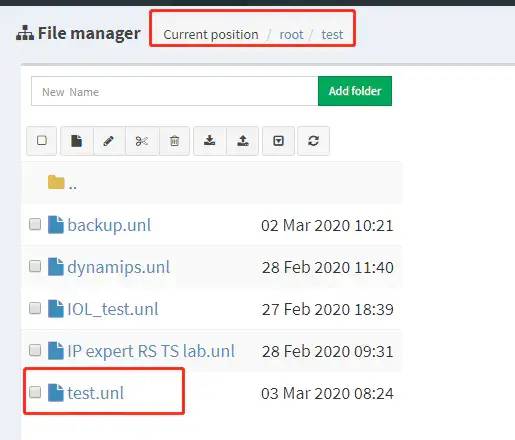
1. 新建lab文件夹test
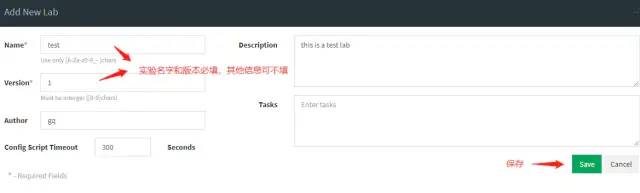
2. 在test文件夹下新建实验进入实验网格界面
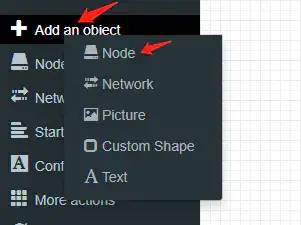
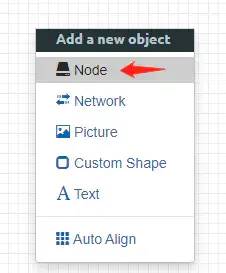
3. 在lab界面新建网络节点,可以点击+号新增node或者在网格内右键新增node
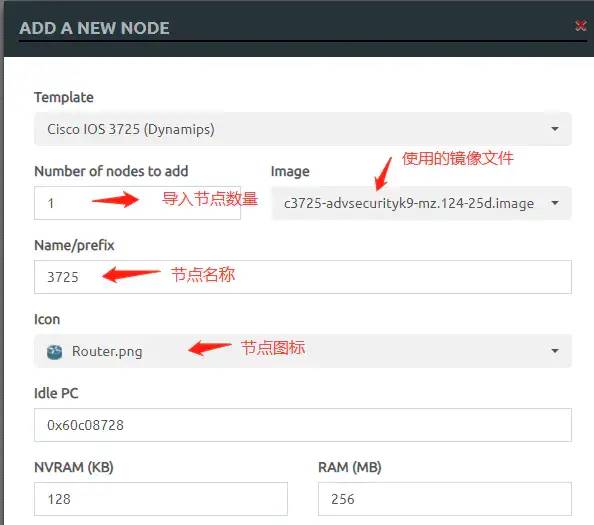
4. 然后选择镜像,列表显示的是eve-ng官方支持默认支持的镜像(非官方镜像后面说明),灰色表示系统中还没有导入该镜像,字体明亮表示该镜像已导入。

5. 选择节点参数,一般默认保存即可

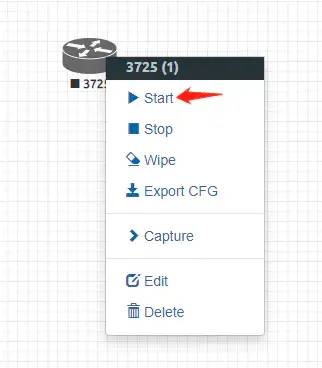
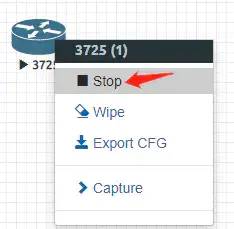
6. 打开节点/虚拟设备,设备从灰色变为明亮,右键选择stop关闭节点。
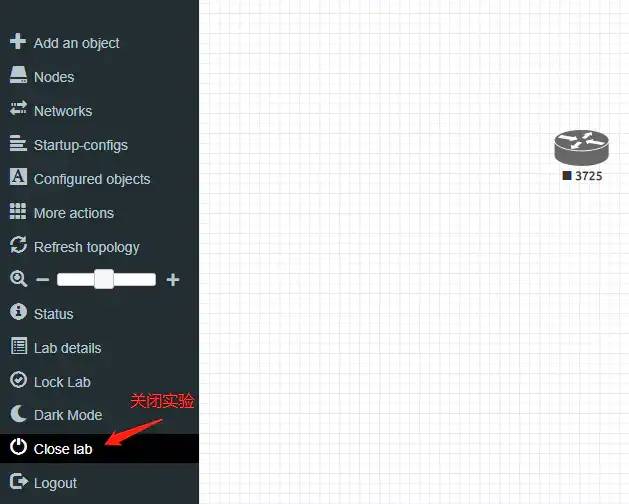
7.关闭实验,查看文件夹中的实验
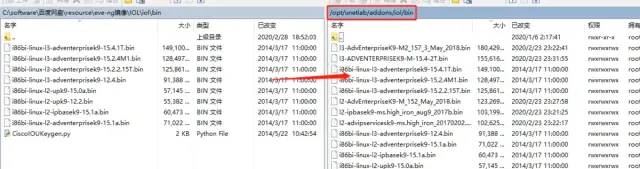
2. 导入IOL镜像(思科内部使用的镜像,实际使用较少)
将本地IOL镜像导入eve-ng/opt/unetlab/addons/iol/bin目录下,xshell进入该目录,
输入python CiscoIOUKeygen.py | grep -A 1 'license' > iourc命令生成iourc文件提供license,
然后输入chmod -R 755 *命令给与权限即可,查看是否导入成功同上

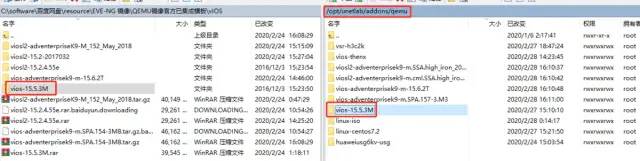
3. 导入qemu镜像(常用)
将本地qemu镜像导入eve-ng/opt/unetlab/addons/qemu目录下(注意导入的是文件夹,文件夹名不要修改,否则找不到模板),
chmod -R 755 *给予读写权限
4. 导入非官方镜像,即节点列表中没有的镜像
eve-ng的强大就在于可以导入不同产商的镜像,这里以导入h3c路由器举例
- 准备工作1,下载vim,eve自带的vi不太好用,所以建议下载vim
apt<span>-</span><span>get</span> update<br>apt<span>-</span><span>get</span> install vim准备工作2,导入自定义图标,从华三官网下载路由器图标改名并上传到eve-ng/opt/unetlab/html/images/icons目录下(该步骤非必要,也可以使用eve系统自带的图标)
1. 导入镜像到qemu目录并改名(改名用于适配模板文件)
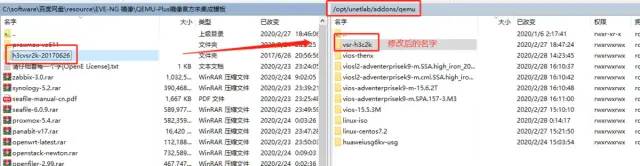
注意到文件名中有-,横杠前面为镜像模板文件名,这是官方规定,每个镜像都有适配的模板,eve系统自带了一些官方模板,所有模板存在目录/opt/unetlab/html/templates,但是非官方镜像eve中是没有模板的,这就需要新建模板文件
2. 新建vsr.yml文件
新建模板采用已存在的模板进行修改即可,由于设备底层一般都是linux,采用linux.yml模板作为原始模板比较好,在templates目录下输入cp linux.yml vsr.yml复制模板文件,这里的vsr和导入的镜像文件名前缀对应
cd /opt/unetlab/html/templates<br>cp linux.yml vsr.yml3. 修改vsr.yml文件
vim vsr.yml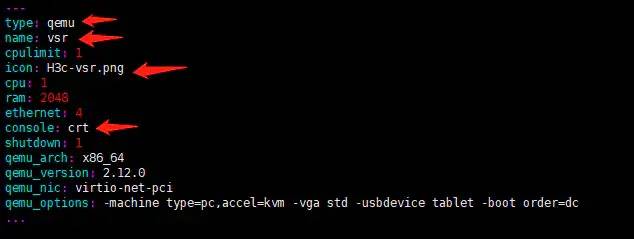
主要修改如图<span>4</span>个地方<br><span>1.</span> <span>type</span>为模板类型,
这里是qemu<br><span>2.</span> name为设备节点默认显示名<br><span>3.</span> icon设置默认默认图标,
我这里选择的已经导入的自定义图标<br><span>4.</span> <span>console</span>选择登录模式,我这里默认采用crt打开该设备,
crt就是SecureCRT,如果安装并配置了SecureCRT建议这样设置4. 修改init.php文件
cd /opt/unetlab/html/includes
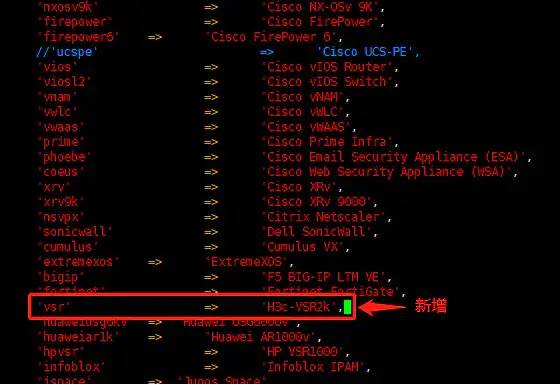
vim init.phpinit.php中包括页面显示的所有镜像节点列表,在node_templates数组中新增一个h3c的数据即可,注意别破坏原有结构
5. web页面检查是否导入成功

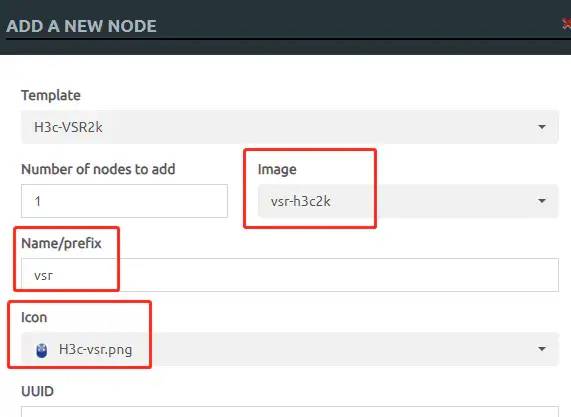

从图中可以看采用了模板的设置,使用了导入的图标而且默认采用crt打开,导入成功。
至此,就可以开始做一些网络拓扑实验了。当然,实际使用时可能还会遇到各种问题,由于篇幅限制,这里就不赘述了。
EVE-NG镜像资源
链接:https://pan.baidu.com/s/1Eg_Tg3ufenRUh2oedANA6g
提取码:0809